What's so different about Maglev Haptics?

As a haptics professional, you are probably already familiar with some of the characteristics of commercial 3- and 6-DOF devices. There are a number of excellent haptic devices out there. But specifications are not always given and sometimes the choice of what to buy is not an easy one to make. What follows is a summary of the characteristics of the Maglev 200™ system, and comparisons with leading high-end haptic devices. If there are any questions, just drop us a note or give us a call.
Workspace Considerations
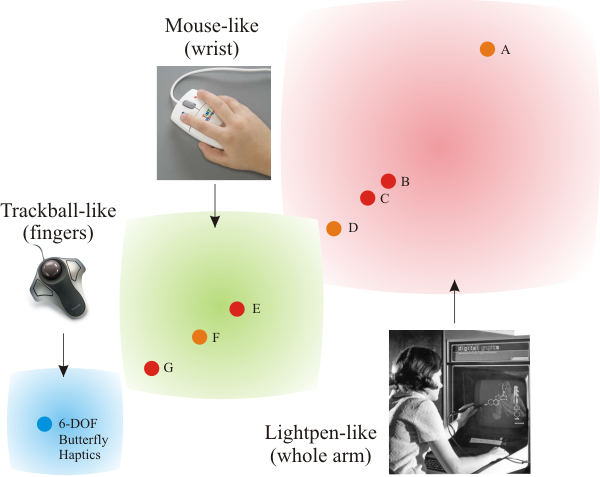
Shown above are roughly visualized workspace comparisons between a number of commercially available research quality haptic devices. Orange circles are 3-DOF devices, and red circles are 6-DOF devices. Earlier devices A-D featured relatively large workspaces involving whole arm motion, reminiscent of light-pen operation. These devices are particularly well suited for applications mimicking real-life operator motion at a one-to-one scale.
More recently, devices E-G have been introduced having smaller motion ranges involving mostly the wrist and fingers, similar to the motions one uses with a computer mouse. The smaller size devices have lower masses and increased performance, suitable for applications such as CAD or medical training in a desktop environment.
The physics of magnetic levitation haptics allows for a workspace approximated by a comfortable range of finger motion, with the wrist in a more or less stationary resting position. The range of motion may be characterized as "trackball-like."
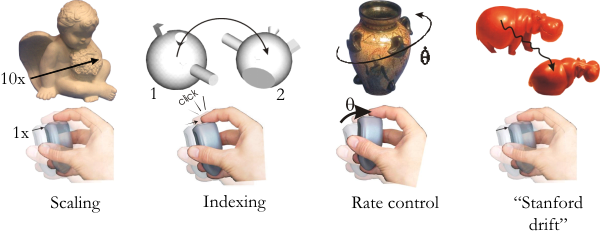
The figure above illustrates several ways to overcome workspace limitations, which are useful for any grounded haptic device. Scaling can be used for many applications, especially in conjunction with graphical displays. Our experience indicates that most users are unaware that they are making small movements to affect large changes in the display. Indexing can frequently be used to explore small regions of a large virtual environment by moving non-haptically from one region to another. Rate control is quite effective in many cases for rotations through large angles. A recent method developed at Stanford University gives the user the impression that the workspace is larger than it really is.
Achievable stiffness and motion resolution
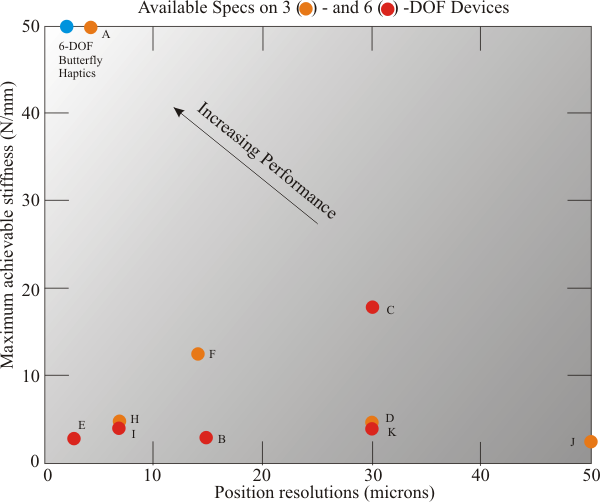
Two very important haptic device attributes are maximum achievable stiffness and position resolution. The figure above is a plot of stiffness versus resolution, with data points from the specifications available for several research quality 3-DOF and 6-DOF haptic interfaces. As can be seen, the 6-DOF maglev device, at 50 N/mm and 2 micron resolution (1 sigma) compares very favorably. Note that device A has high stiffness, but poorer motion resolution. Be aware that some manufacturers specify device resolution as the encoder resolution at the motor, which completely ignores lost motion and compliance in the mechanism!
Backdrive Friction and Perceived Mass
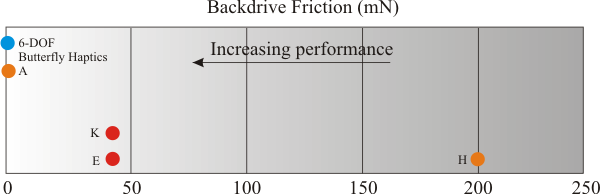
Backdrive static friction is a very important specification for impedance-type haptic devices. Friction is caused by mechanical effects in bearings, cables, and motor brushes (if present). Some companies do not specify these data. The figure above shows backdrive friction from five devices expressed in mN. It can be seen that the 6-DOF devices K and E have good values, much better than 3-DOF device H. The 6-DOF maglev device and the admittance device A have essentially zero static friction.
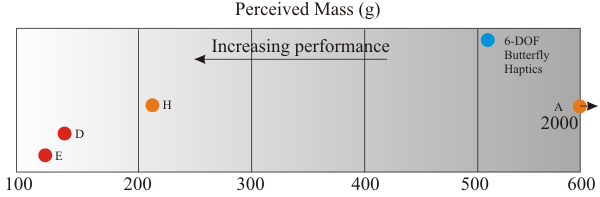
Another important attribute is perceived mass as shown in the figure above. Here, the perceived masses for four different commercial devices are plotted. In this case, the maglev device does not compare favorably due to its flotor mass of a bit more than 500g. It is interesting to note that device A, which has a high stiffness, also has the poorest perceived mass. Having a low perceived mass mostly determines how the device feels when moving rapidly through free space. We believe perceived mass is much less important during interaction with virtual environments when feeling contact events with rigid and flexible objects.
Other important considerations
There are, of course, many other important characteristics to be considered. For example, to simulate fine texture and friction effects, it is helpful to have both high position bandwidths and high force bandwidths. The maglev technology can exceed 140 Hz position bandwith and several KHz force bandwidth at -3dB, much higher than other 6-DOF devices. Having interchangeable manipulandi or handles suited to different applications is an important benefit. Many potential applications require a 7th grasping DOF. Cost, ruggedness, ease of use, and ergonomics are important attributes. The pose of the Maglev 200™ devices can be re-oriented in the desktop so the user can comfortably rest a forearm on the table, with the wrist supported at a natural attitude. Finally, the software must be easy to use. We provide a comprehensive SDK with a structured API and graphical monitor providing immediate access to all device functions.
Is maglev haptics right for your research or advanced application?
It is clear that the performance of maglev haptics lies in a qualitatively different regime from that of current mechanical interfaces. But is it right for you? First of all, if you require a large motion range, then maglev haptics will not be your cup of tea. You should consider maglev haptics if your research or advanced application requires comfortable ergonomics, high resolution, high stiffness ranges, and high force and position bandwidths. For many applications, it will be necessary to employ scaling, indexing, and rate control techniques as outlined above.
Some areas in which maglev haptics excels is in the simulation of subtle texture and friction effects; a mix of hard and soft contact like virtual surgery or virtual dentistry; mechanical CAD where inter-part fits and compliances must be evaluated; in teleoperation or micro-telemanipulation with remote robots or STMs and AFMs; in haptic interaction with multi-dimensional data sets generated by CT/MRI or supercomputer models; and in free-form character design and manipulation.
At Butterfly Haptics, we like to think of ourselves as providing a fine scientific instrument which can serve as a generic platform for a host of multi-disciplinary studies. Please monitor our web site for additional developments.