Butterfly Haptics Community
Magnetic Levitation Haptic Consortium
The Magnetic Levitation Haptic Consortium is a community web site sponsored by Carnegie Mellon University's Microdynamic Systems Laboratory. The web site allows owners and users of maglev haptic interface systems to share ideas, code, demos, applications, bug reports and fixes. It is also open to the broader community of folks who may be interested in the subject.
Support
No new technology can be effective without a high level of customer support. Butterfly Haptics is dedicated to providing this support. Registered customers may download the latest Windows and Linux client source and the QNX controller server code from the secure Download Page.
Research and advanced applications highlights
Texture Synthesis and Perception
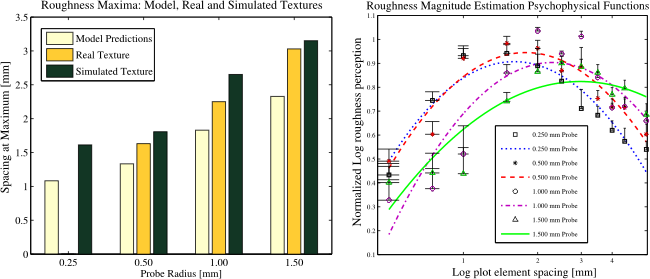
In this work from Carnegie Mellon University, A magnetic levitation haptic device was used to simulate a dithered textured surface made up of conical elements. A constraint surface algorithm allowed the cone size, shape, mean inter-element spacing and probe size, to be varied in realtime. Subjects used virtual spherical probes of four different sizes to explore textures over a range of element spacings. Results showed that the high motion bandwidth, fine spatial resolution and high stiffness of the haptic device allowed the production of virtual textures with roughness perception characteristics comparable to geometrically similar real textures.
"The Geometric Model for Perceived Roughness Applies to Virtual Textures," B. Unger, R. Hollis, and R. Klatzky, The 16th Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems, Reno, NV, USA, March 13-14, 2008.
3D Force Control on the Human Fingerpad
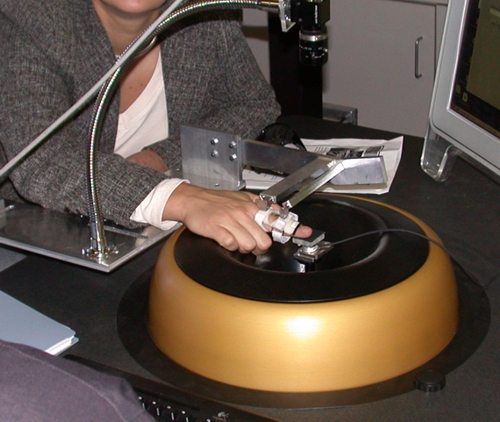
In this work from the University of Utah, a Maglev 100™ is used to apply fast, accurate, and stable force control in three axes simultaneously when a flat surface is pressed against the human fingerpad. The primary application is the automated calibration of a fingernail imaging system, where video images of the fingernail are used to predict the normal and shear forces that occur when the fingerpad is pressed against a flat surface.
"3-D Force Control on the Human Fingerpad using a Magnetic Levitation Device for Fingernail Imaging Calibration," T. Grieve, Y. Sun, J. Hollerbach, and S. Mascaro, Third Joint Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Salt Lake City, UT, USA, March 18-20, 2009, pp. 411-416.